Full Text
Coastal ecosystems are suffering immediate and detrimental consequences of a warming global climate. Ocean heating, rising sea level, and increasing coastal storm frequency and intensity are imposing stresses on coastal environments that historically were less frequent and less severe. At the same time, human population within 100 km of the coast is projected to nearly double by mid-century, increasing pressure on a variety of marine services including fisheries and recreation. Shallow water environments are key components of healthy coastal ecosystems as they provide feeding grounds and nurseries for fish and crustaceans and act to buffer the impacts of coastal storms on adjacent land areas. But they are also susceptible to rapid degradation because stresses are distributed within a compressed water volume. To address these challenges, policymakers and natural resource managers increasingly rely on more accurate and timely environmental data.
The past two decades of robotic and sensor technology development have resulted in ocean observing systems that can monitor and survey water column properties autonomously at temporal and spatial scales and in environmental conditions that exceed what is possible with traditional human-based operations involving ships and divers (Chai et al., 2020). Most recently, new system concepts are providing more complete environmental descriptions of shallow water environments, including water quality and the shape and composition of the seafloor.
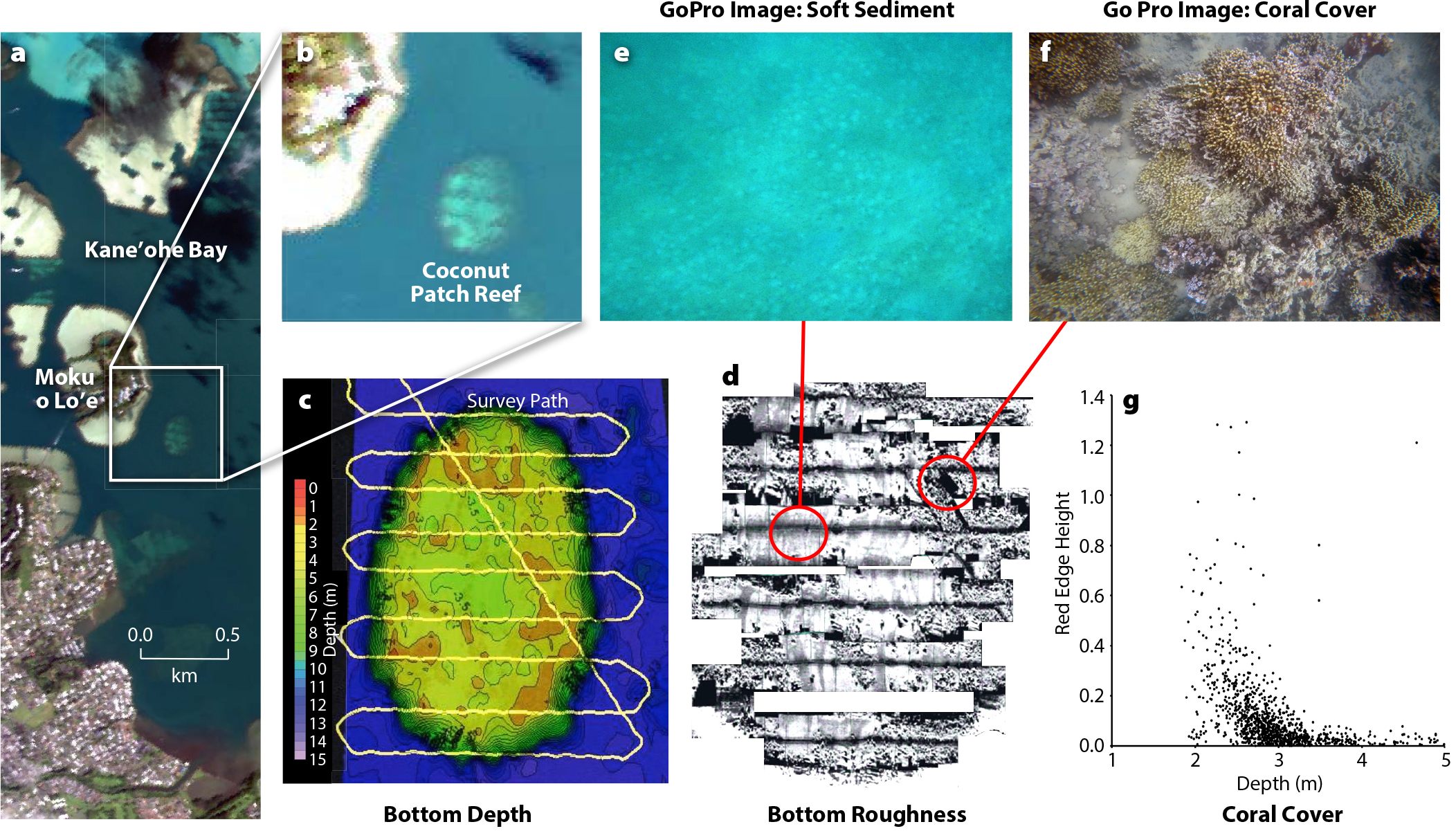
In 2017, the US Naval Research Laboratory (NRL) began developing robotic surveying approaches that support remote sensing of shallow coastal environments (Ackleson et al., 2017). The initial approach was to use a modified, self-navigating kayak towing an instrumented buoy to survey water depth, photograph the shallow bottom in high definition, and simultaneously record how different colors of light are reflected from the water column (Figure 1a). Field surveys conducted in Kane’ohe Bay, Hawai’i, provided high-resolution maps of bottom depth and coral cover (Figure 2). The data were used to assess how well sensors on aircraft and satellites are able to map water depth and bottom cover on coral reefs.
|
|

|
|
Following the successful Kane’ohe Bay surveys, NRL began designing a new robotic system capable of providing more complete descriptions of shallow water environments, including water clarity, phytoplankton (microscopic marine algae) concentration, water currents, bottom depth, and organisms inhabiting the seafloor. In addition to providing environmental sensing, the system had to be easily managed with a minimal workforce and inexpensively transported to remote locations. The final design, the Autonomous Coastal Color Environmental Survey System (ACCESS; Figure 1b), is essentially an instrumented outrigger system that can be attached to any recreational kayak and powered with standard 12 V marine batteries. The outrigger design offers increased stability, and the kayak provides housing for heavy batteries. For distant field deployments where a kayak and batteries can be sourced locally, only the outrigger components need to be transported, thus reducing shipping costs. ACCESS is easily disassembled and stored or transported in a small number of protective boxes, each of which can be managed by one or two people.
ACCESS surveys can be conducted in waters as shallow as 0.5 m. The operator communicates with ACCESS remotely across maximum distances of 1–2 km using a hand-held computer pad. Survey missions are either planned in advance or controlled manually onsite using open-source software commonly used to control general purpose drones. Map-based graphics show the platform location and speed, and separate windows display user-selected data streams in real time. An infrared camera continuously scans the forward sea surface for any obstacles that could impede the survey. Propulsion is provided with an array of four independently controlled thrusters that can be easily replaced in the field. Survey speed is user selected and generally ranges between 2 km/hr and 8 km/hr, and surveys can last up to 6 hours. ACCESS may be deployed from a shoreline using a light-weight custom cart or from a small research vessel.
ACCESS represents an important step in the evolution of robotic ocean survey systems, enabling detailed surveys of important shallow water habitats that support remote-sensing operations and aid in monitoring environmental changes in response to climate and human activities. However, survey needs, such as the mix of sensors and navigation attributes, are not all the same for each user, and requirements frequently change with user knowledge and experience. The good news for potential users is that highly capable and cost-effective systems can be built and customized using readily available components and open-source software, and how-to instructions and videos are easily found on the internet. Aside from the various environmental sensors, ACCESS makes use of 80/20 aluminum building components (https://8020.net/), Blue Robotics plug-and-play T200 thrusters (https://bluerobotics.com/), and Robotic Operating Software (https://www.ros.org/).