Full Text
Interferometric synthetic aperture sonar (InSAS) is an emerging sonar technology for high-resolution mapping and imaging of the seafloor. This technology is increasingly utilized for defense- and commercial-related applications. However, its application for scientific and environmental purposes remains limited. In this article, we describe the development of InSAS as a tool for seafloor characterization. We discuss the potential applications for InSAS that extend its use beyond traditional defense and offshore infrastructure related surveys to applications for habitat classification, environmental monitoring, and seafloor geological characterization.
Seafloor Exploration
Exploration of the deep seafloor commonly involves the acquisition of two different types of data: direct imaging from optical surveys and geophysical remote sensing using sonar-based surveys. Optical, or visual, surveys use cameras mounted on underwater vehicles or towed platforms, and, more recently, lidar and other laser-based systems. These types of surveys provide the most detail so that when using cameras, a “true” image of the seafloor is obtained. However, optical surveys are limited by the very restricted field of view (meters to maybe tens of meters) in front of or below the camera or laser system, making these types of surveys impractical for covering large areas of the seafloor.
Acoustic-based surveys, such as a multibeam echosounders or side-scan sonars, produce digital elevation models and associated backscatter intensity maps of the seafloor using sonar systems mounted on surface vessels or on underwater and towed vehicles. Sonar systems rely on the effective propagation of sound through water over large distances, compared to optical surveys that rely on light, which attenuates quickly in water. Sonar systems can therefore cover much wider areas (up to several kilometers on either side of a survey line for deep water systems) to measure seafloor bathymetry (depth) and associated backscatter intensity maps (in the case of multibeam surveys) or backscatter-based acoustic images of the seafloor (in the case of side-scan sonar surveys).
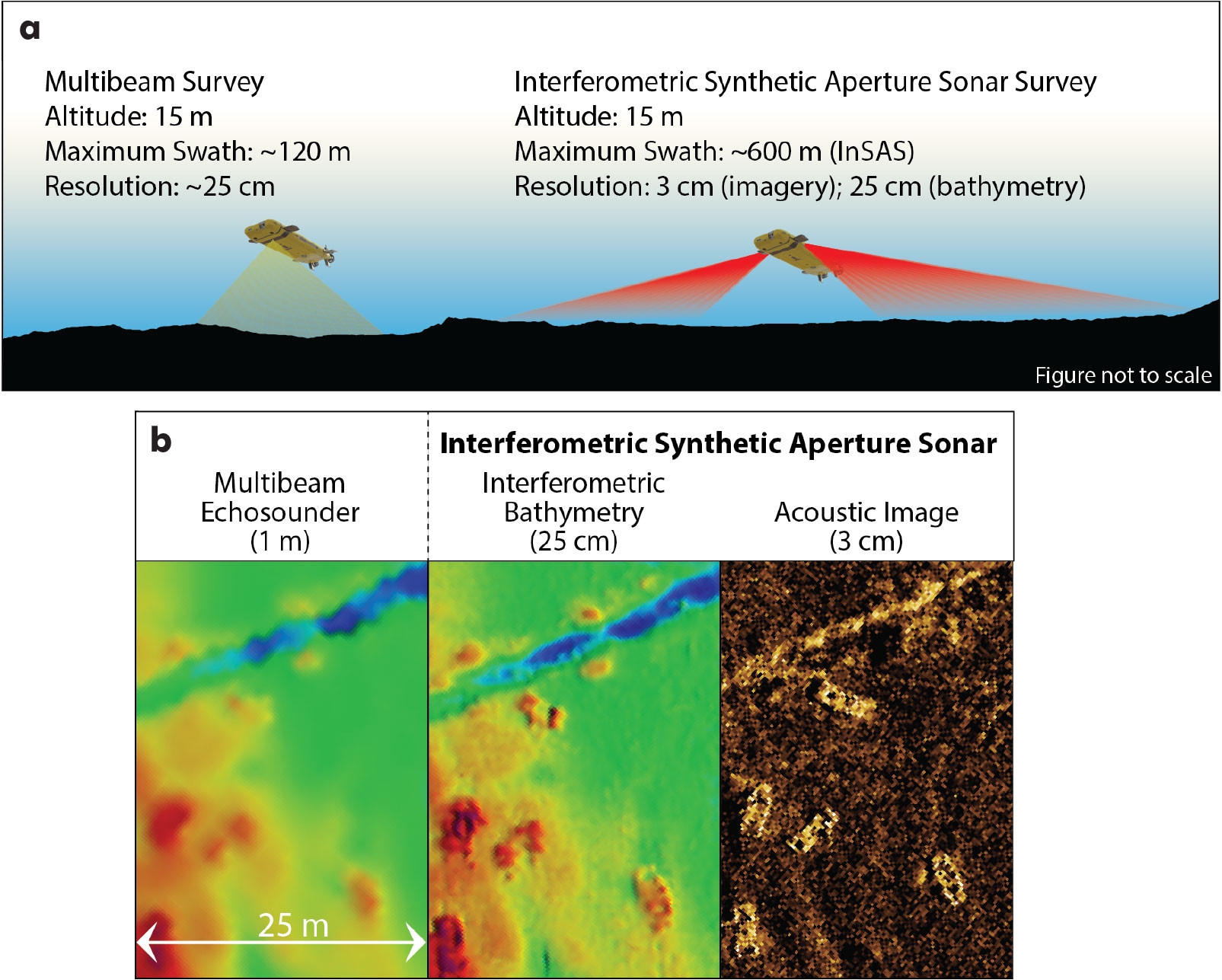
The spatial advantages of sonar-based surveys, relative to optical surveys, are offset by the lower resolution of the resulting data, which can range from less than 10 cm horizontal resolution for near-seafloor surveys obtained using autonomous underwater vehicles to as much as 100 m horizontal resolution for deep water surveys acquired from surface vessels. It is this trade-off of resolution versus coverage area that must be considered when designing a seafloor survey to fulfill its objectives. InSAS can achieve a horizontal resolution of 3 cm (or better with post-processing) for backscatter imagery and ~25 cm for derived bathymetry, combined with a survey swath that can range from 100 m to ~400 m on either side of the sensor platform (wider swaths can be achieved but at lower horizontal resolutions). InSAS therefore provides a significant improvement on the trade-off between data resolution and spatial coverage (Figure 1). The ranges of possible resolutions and survey swaths reflect the fact that, for all types of acoustic surveys, these parameters are also controlled by the sonar frequency used, vehicle altitude, beam angles, and survey speed.
|
|
Interferometric Synthetic Aperture Sonar
Synthetic aperture sonar is similar to traditional side-scan sonar in that it produces an acoustic image of the seafloor. The primary difference is that, unlike regular side-scan sonar, for which the resolution of the image decreases laterally with distance from the sensor platform as sound propagates and spreads, the resolution of InSAS imagery remains constant over the entire survey swath (Figure 2). The swath itself is also wider than that of a typical near-seafloor multibeam survey, resulting in greater survey coverage, although the side-looking geometry of the sonar does result in a data gap (nadir) below the vehicle (Figure 1).
|
|
The principles of InSAS are derived from the earlier development of synthetic aperture radar, which is widely used in satellite and aerial remote sensing to generate 2D and 3D images and topographic models of Earth’s surface (Hansen, 2011). For sonar systems, the length, or “aperture,” of the transducer that sends and receives the acoustic signals is a primary constraint on the resolution of the acquired data. The longer the aperture, the higher the possible resolution of the resulting data. For InSAS, a “synthetic” aperture is generated by using the along-track movement of the survey vehicle to create a longer simulated aperture than the physical transducer. Specialized signal processing allows for an object on the seafloor to be imaged by combining several sonar pings as the vehicle moves along the survey track, producing a higher resolution image. Because objects further away from the vehicle are imaged with a higher number of pings, the resulting image resolution remains constant and independent from the lateral distance to the vehicle.
For the “interferometry” aspect of InSAS, the phase difference of the return acoustic signals recorded at two vertically separated receivers is used to determine the height (or depth) of objects on the seafloor (Saebø, 2010). This information allows for a bathymetric grid to be simultaneously generated from the same data used to generate the acoustic backscatter image, thereby producing two datasets from a single survey. The resolution of the resulting bathymetric data (~25 cm) is similar to what can be achieved by a multibeam survey flown at the same altitude, but with a much wider swath (~600 m for InSAS at an altitude of 15 m, minus the nadir gap, versus <100 m for a multibeam system). Examples of InSAS sensors include Kraken Robotics’s MINSAS, Kongsberg’s HISAS, Exail’s Sams, and Northrop Grumman’s mSAS. Swath widths and resolutions vary, depending on system frequencies, survey speeds, and altitude (Figure 1). Sensors can be mounted on surface vehicles, towed vehicles, autonomous underwater vehicles, and remotely operated vehicles.
Applications for Synthetic Aperture Sonar
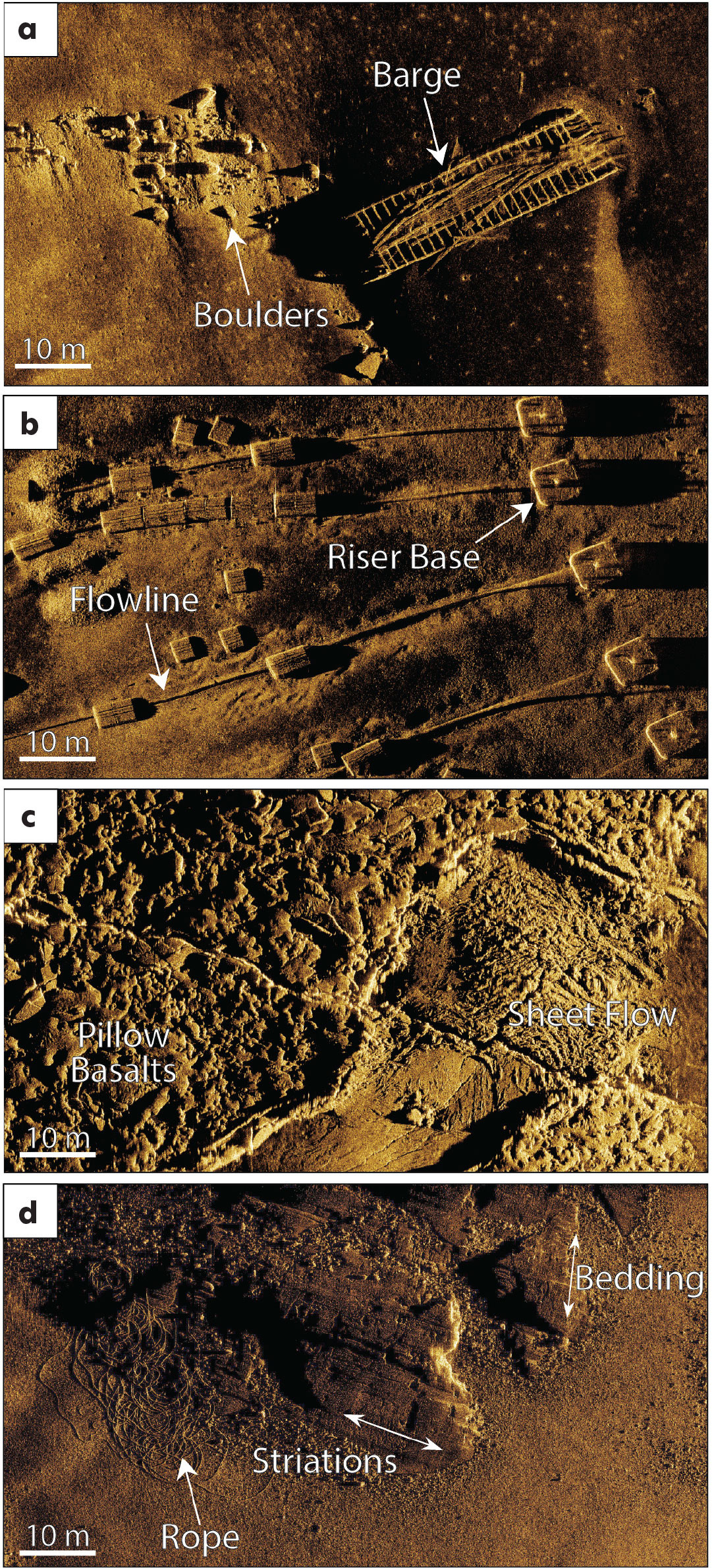
The first applications of InSAS focused on defense-related deployments, primarily for mine countermeasures and reconnaissance, for which the wide swath and high-resolution imagery are ideally suited. The past decade has seen increasing applications of InSAS for commercial applications such as marine archeology and maritime searches for shipwrecks, aircraft, and lost cargo (Figure 2a), as well as pipeline, communications, and offshore energy infrastructure inspection and monitoring (Figure 2b). However, applications of InSAS as a tool for general seafloor characterization remain limited. Recent surveys on the continental shelf off the east coast of Canada and at the Galápagos Spreading Center, a volcanic ridge north of the Galápagos Islands, reveal the level of detail that can be derived from InSAS data with respect to substrate composition and textures, including specific seafloor lava flow morphologies (Figure 2c) and bedrock features such as bedding orientations and glacial striations (Figure 2d; Gini et al., 2023). The combined high-resolution and high coverage area of InSAS offers significant potential for various scientific, conservation, and spatial planning applications, including habitat mapping, geology, and environmental monitoring and baselines studies.
There are, however, limitations to where and how InSAS data can be successfully collected. The most significant limitation is data collection in topographically complex seafloor terrain. The synthetic aperture requires a high degree of vehicle stability along the survey track. The relatively low survey altitudes required for InSAS surveys (e.g., ~10–50 m) often necessitate changes in survey vehicle depth and direction to avoid obstacles and maintain constant altitude, introducing pitching and yawing of the vehicle that can easily exceed the stability limits required to generate high-resolution images (Gini et al., 2023). Low survey altitudes further result in the potential for the occurrence of significant acoustic shadows behind objects or terrain features that create data gaps. Future development and testing of InSAS should focus on improving its versatility for surveys over complex seafloor topography.
Looking forward, deep-sea mining for polymetallic nodules on deep abyssal plains has the potential to become the next large-scale human activity to impact the seafloor. With its wide swath and resolution high enough to detect potato-sized nodules on the relatively flat seafloor, InSAS is the ideal tool for nodule exploration and resource assessment, as well as impact monitoring and pre- and post-mining environmental assessment.
Acknowledgments
This work was supported by the Ocean Frontier Institute Benthic Ecosystem Mapping and Engagement (BEcoME) Project. JJ and KR acknowledge funding support from the Canada Research Chairs program. CG acknowledges funding support from the Mitacs Accelerate Fellowship. The authors thank Kraken Robotics for providing the InSAS data from the Scotian Shelf and for supporting InSAS data collection along the Galápagos Spreading Center. The Galápagos data were collected as part of a Schmidt Ocean Institute (SOI)-supported expedition (FKt231024) on R/V Falkor (too), and SOI is acknowledged for providing the ship time and remotely operated vehicle for this project. The Galápagos expedition was further supported by Stuart Banks at the Charles Darwin Research Station and the Charles Darwin Foundation, the Galápagos National Park Directorate, and the Instituto Oceanográfico y Antártico de la Armada de Ecuador (INOCAR).