Full Text
The Need
The need to establish a sustained Global Ocean Observing System (GOOS) has long been recognized by the international ocean science community. Established in 1991 and led by the Intergovernmental Oceanographic Commission of the United Nations Educational, Scientific, and Cultural Organization (IOC-UNESCO), GOOS develops guidelines and coordinates regional alliances across the world’s ocean basins to evolve the system. The need to sustainably expand GOOS has recently gained urgency as expressed in the United Nations Decade of Ocean Science for Sustainable Development (2021–2030) Challenge 7: Ensure a sustainable ocean observing system across all ocean basins that delivers accessible, timely, and actionable data and information to all users.
Developing “innovative in situ, autonomous and cost-effective technologies” is flagged as a pillar for the sustainable expansion of GOOS (Miloslavich et al., 2024). Technological developments that will enhance sustained monitoring systems include advances in sensors (increased accuracy and stability) and in the autonomous robotic systems (e.g., Argo floats and gliders) that carry such sensors across the world ocean. Improvements in batteries and memory will support longer deployments of stand-alone sensors, benefiting the Eulerian component of GOOS.
Although tracking climate-induced changes in the deep ocean and at the seafloor is a fundamental requirement for managing the ocean and the services it provides and for informing decisions about active climate remediation (Levin, 2021), accessing the deep sea remains a challenge. A well-established approach for gathering Eulerian measurements at the seafloor is through the use of benthic stations or landers. An oceanographic lander is any structure designed for placement on the seabed to host a variety of sensors for autonomous operation (Jahnke, 2003). Landers have been in use for decades, but the high cost of their recovery systems, typically based on fitting the landers with buoyancy modules, releases, and expendable ballast, have so far prevented widespread use and development of monitoring strategies based on benthic station arrays or swarms, with a few costly exceptions.
Development of a system for cost-effective deployment and recovery of landers would help implement distributed networks of high-temporal-resolution Eulerian nodes at the seafloor. International environmental monitoring commitments, including management plans for deep marine protected areas (MPAs) or, in the particular case of Europe, collecting baseline line data for the Marine Strategy Framework Directive, specifically require sustained collection of essential ocean variables (EOVs) at the seafloor. In addition, lander swarms offer an invaluable tool for supporting targeted scientific studies. Circulation and dynamics at complex topographic sites such as canyons or seamounts, where notable deep-sea ecosystems typically thrive, cannot be properly quantified without simultaneous measurement at several sites. Likewise, understanding shelf-slope currents, critical for margin exchange processes and meridional mass and heat transports, requires distributed measurement spots. In addition to physical oceanography instruments, the landers can host other types of sensors, making fleets of landers a truly multidisciplinary research tool.
LanderPick System
Targeting this technological challenge, development of the LanderPick system has been underway as a series of proof-of-concept projects by the Spanish Institute of Oceanography (IEO-CSIC) since 2020. Continuous advances in vessel dynamic positioning systems as well as improvements in subsea vehicle positioning and tracking systems (typically ultra short baseline [USBL] technology), has made feasible the control of a remotely operated towed vehicle (ROTV) accurately enough to approach a lander sitting on the seafloor with sub-meter accuracy. This is the unconventional idea of the LanderPick approach.
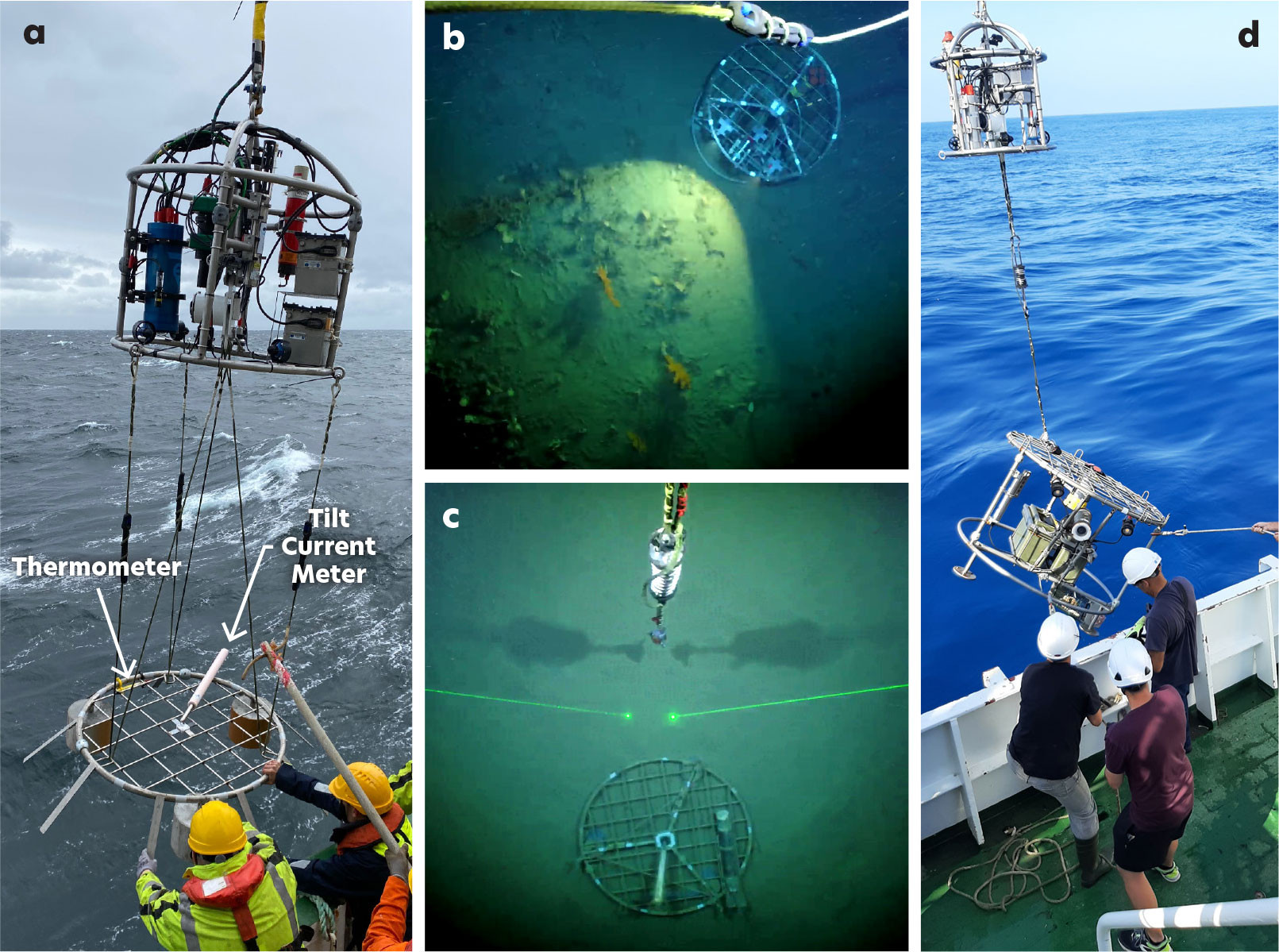
The LanderPick concept entails (1) development of a specific, cost-effective, and compact ROTV capable of transporting a lander for placement/hitching, with visual assistance, at/from the seafloor, and (2) development of landers provided with built-in metal “cobweb” structures for easy hitching (Figure 1). Two vehicle prototypes, LanderPick-2000 and LanderPick-6000 (operational depths of 2,000 and 6,000 m), have been constructed. Outfitting of each of these vehicles includes a high-definition underwater camera, spotlights, a heavy-load mechanical release, and thrusters. During the landing process, auxiliary cords facilitate the connection between the release mechanism and the lander. Once the landing is visually confirmed at the target location, these cords are disengaged. Lander recovery requires use of the ship’s dynamic positioning system, which serves as the primary navigational tool directing the LanderPick ROTV to the target location. Aided in the final stages by the LanderPick camera and propellers, a grapnel hooks the lander “cobweb.”
|
|
Current Testing and Operations
Among the lander designs conceived and built, the simplest features a circular recapture “cobweb” mesh with three ballasted legs (disk-type) specifically arranged to accommodate economic tilt-current meters and other small instruments as thermometers (Figure 1a,c). Cylindrical lander units allow for the installation of many more instruments (Figure 1b,d). Nearly 200 successful LanderPick operations from shallow waters to 1,500 m depth demonstrate system robustness and an operational time on the order of tens of minutes. A few failures have also occurred: three lander recovery attempts in shallow areas were aborted due to high turbidity that prevented visual operation when ship time was available. Because expectations are that these landers are still in place, further recovery attempts will be sought in the future. One lander was trawled and returned by a fishing vessel, with some instruments damaged. Although standard landers are deployed with a service horizon of one year, some deployments have exceeded 18 months.
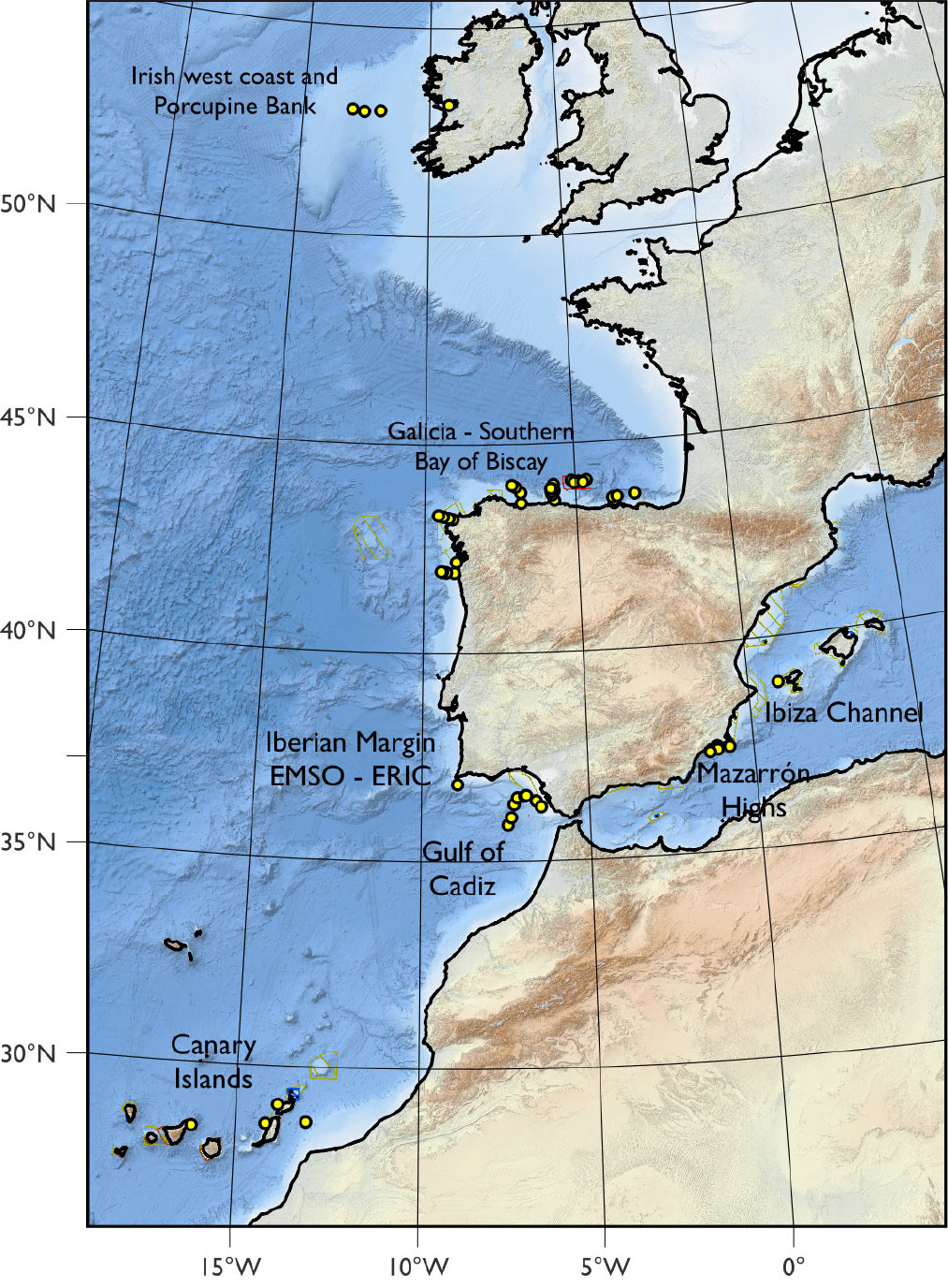
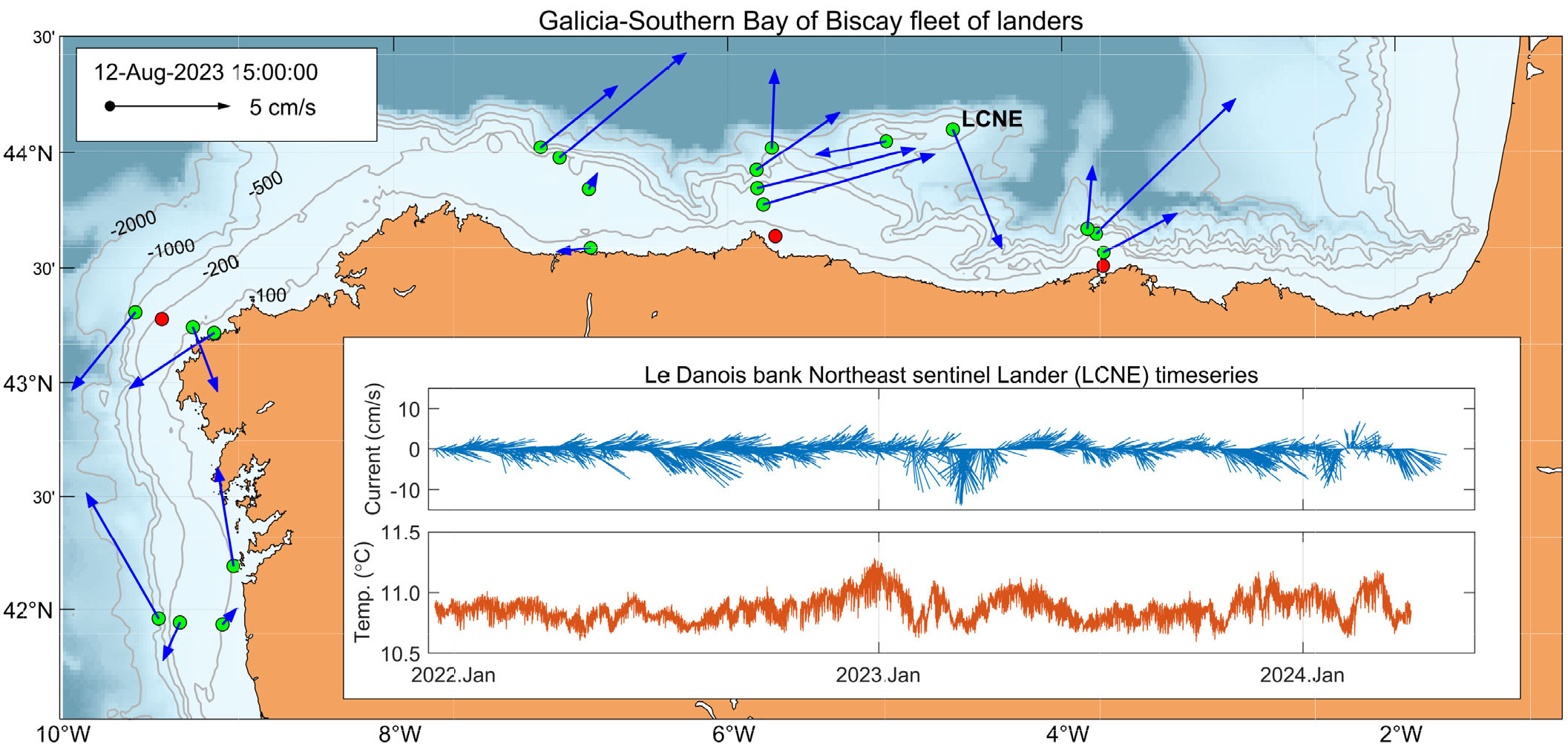
A fleet of about 40 landers is currently operating in Spanish waters (Northwest Iberia, Gulf of Cádiz, Canaries, and Mediterranean Sea; Figure 2). Small landers provide distributed basic EOV monitoring (hydrography and currents) of the seafloor along the continental shelf and slope, currently only at trawl-free sites. Cylindrical landers are mostly located in Spanish MPAs to track environmental variables during the periods between ship-based monitoring cruises (i.e., serving as sentinels). These landers incorporate additional instruments, including biogeochemical sensors for pH and hydrophones for ambient noise and/or marine mammal tracking, and some units add time-lapse image systems (Figure 1b,d). Specific short-term experiments, supported by arrays of landers, have been conducted to pursue complex hydrodynamic processes, in particular, the breaking of internal tides at canyon heads, overflow downstream of Gibraltar Strait, recirculation patterns at seamount rims, and coherence of shelf-slope currents across wider regions (Figure 3).
|
|
|
|
The initial investment for the LanderPick ROTV prototype system is approximately $150,000, which is comparable to or cheaper than other ROTVs. The total cost of a LanderPick-compatible lander is about an order of magnitude lower than conventional landers that use buoyancy, ballast, and release mechanisms. Without these expensive recovery mechanisms, LanderPick-compatible landers cost between $3,000 and $5,000, depending on payload size and configuration. For example, in late 2024, a steel-fabricated lander equipped with a tilt current meter and temperature sensor for shelf work (≤300 m) cost $2,908, while a deep-water lander (≤3,000 m) cost $5,315.
The lander technology has demonstrated robust performance with minimal maintenance requirements. Furthermore, the LanderPick deployment and recovery procedures have proven to be more time efficient than servicing standard landers, resulting in significant ship-time savings. This efficiency is particularly advantageous, as lander servicing is typically conducted as an ancillary activity within routine environmental monitoring or scientific expeditions. Consequently, the LanderPick system can be regarded as a cost-effective complementary solution for oceanographic research and monitoring operations.
The Future
The current fleet of landers operated by the LanderPick system in Spain has formally become part of a sustained ocean observing system that supports environmental management commitments. Since 2023, and especially in 2024, the volume of data coming from the lander arrays has begun to be significant, making it necessary to implement protocols and procedures for transferring it to data centers following FAIR (findable, accessible, interoperable, and reusable) principles, as required by most funding agencies. Currently, data are being incorporated into Spanish marine repositories as part of bulk databases assembled from cruises employed for (but not dedicated to) recovery. Specific treatment of lander records is still being designed.
While the system can now be considered operational, future refinements are being addressed under ongoing projects. The LanderPick-6000 has been designed to operate at great depths, but the lack of appropriate cable has so far prevented it from surpassing 1,500 m. Testing the system in the 2,000–5,000 m depth range is a major near-future objective. Another challenge is gathering data at the continental shelf where trawling activity occurs; a LanderPick-suited anti-trawl lander is being designed for testing in summer 2025. Additional goals include continuing to lower the cost of simple lander units and ensuring that landers can measure for longer periods (well over a year). Real-time data transmission from landers, a declared desire of the oceanographic community, will be possible depending on future developments in underwater communication systems, in terms of both cost and reliability.
International collaboration to further develop the system and transfer the LanderPick technology began in 2022, driven by the need for coordination among ocean observing systems in neighboring regions. Scientists from the Irish Marine Institute and the Portuguese Instituto Português do Mar e da Atmosfera joined a Spanish cruise on board R/V Ramón Margalef in July 2023 to deploy an array of 20 landers across the north and northwestern Spanish continental shelf and upper slope (Figure 3). In April 2024, Spanish scientists participated in an Irish cruise around Porcupine Bank on board R/V Celtic Explorer, successfully deploying four landers (Figure 2). This provided an opportunity to test the LanderPick-6000 vehicle on a different vessel, which was equipped with fiber-optic cable capabilities, and demonstrated the feasibility of technology transfer. Recovery of this set of landers is expected in early May 2025.
Under a proposal to access EMSO (European Multidisciplinary Seafloor and Water Column Observatory) sites, at least two landers will be deployed in April 2025 around the Iberian Margin EMSO site (Figure 2) from the Portuguese R/V Mario Ruivo. Successful deck testing of the system on this vessel has already taken place.
These international cooperation experiences lay the foundation for what we hope will become a coordinated network of cost-effective lander arrays for sustained seafloor monitoring across Western Europe in an effort called Atlantic Arc Lander Monitoring (ALaMo). The network aims to contribute to the development of “innovative in situ, autonomous, and cost-effective technologies” highlighted in the UN Ocean Decade white paper (Miloslavich et al., 2024). Lessons learned from the operation of the system in our three countries will provide refined procedures and protocols for using the system on several oceanographic vessels. The joint effort will also improve analysis, exploitation, and transfer of the data gathered by lander systems. Figure 2 shows that a first piece of the ALaMo network across the Northeast Atlantic boundary is already in place. Further deployments along Portuguese and Irish coasts are planned, followed by expansion into French and Moroccan waters.
ACKNOWLEDGMENTS
The LanderPick system was developed under the LanderPick, LanderPick-2, and LanderPick-3 projects by the Pleamar Program (Fundación Biodiversidad, MITECO, UE EMFF funds) and grant TED2021-132887B-I00 by MCIN/AEI, NextGenerationEU. The participation of AMPS on the R/V Ramón Margalef cruise received Portuguese national funds from the Foundation for Science and Technology (FCT) through projects UIDB/04326/2020 and LA/P/0101/2020. The authors declare no conflicts of interest.